FANUC A20B-2001-0821 | บอร์ดควบคุมเซอร์โว SVM ซีรีส์ Alpha — ต้นกำเนิดจากญี่ปุ่นสำหรับ CNC และหุ่นยนต์
หมายเลขชิ้นส่วน: A20B-2001-0821
ผู้ผลิต: FANUC Corporation (ญี่ปุ่น)
ประเภทผลิตภัณฑ์: บอร์ดควบคุมเซอร์โวแอมพลิฟายเออร์ (SVM PCB)
ซีรีส์บอร์ด: A20B-2001
ตระกูลไดรฟ์: FANUC Alpha Series Servo Amplifier Module (SVM)
การใช้งาน: ระบบเซอร์โวไดรฟ์ CNC และหุ่นยนต์ FANUC
ภาพรวม
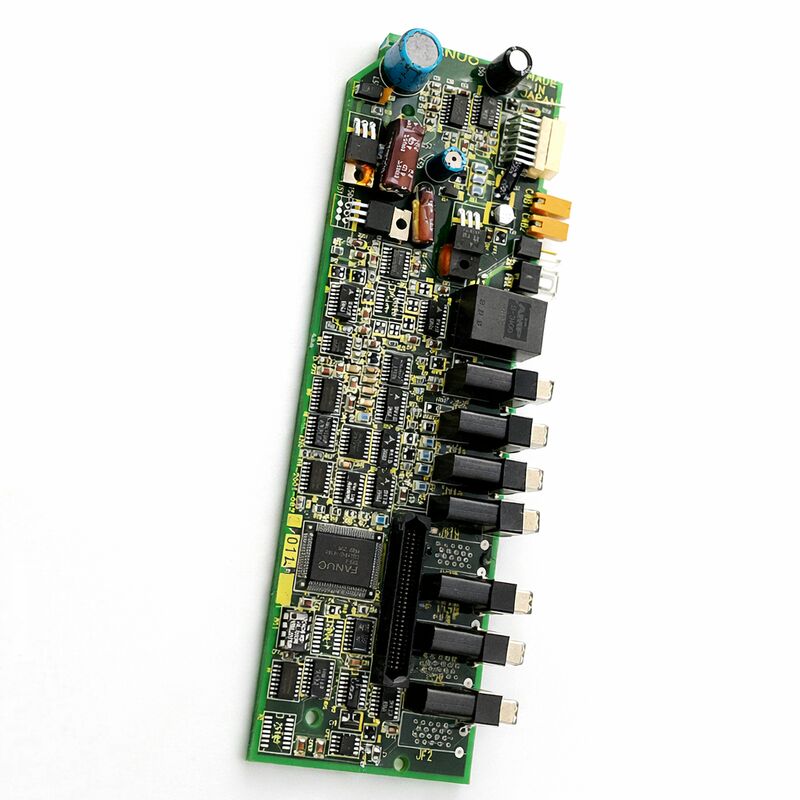
A20B-2001-0821 เป็นบอร์ดควบคุมเซอร์โวแอมพลิฟายเออร์สำหรับ FANUC Alpha Series Servo Amplifier Module (SVM)
ในสถาปัตยกรรมไดรฟ์ Alpha แบบโมดูลาร์ของ FANUC, SVM คือยูนิตแอมพลิฟายเออร์ที่จ่ายไฟโดยตรงให้กับเซอร์โวมอเตอร์ — รับแรงดันไฟฟ้า DC bus ที่จ่ายโดย PSM และแปลงเป็น AC ความถี่แปรผันสามเฟสที่ขับเคลื่อนมอเตอร์
A20B-2001-0821 คือบอร์ดควบคุมภายใน SVM: PCB ที่มีวงจรอิเล็กทรอนิกส์ประมวลผลสำหรับลูปกระแสของเซอร์โวไดรฟ์, ลูปความเร็ว, อินเทอร์เฟซป้อนกลับเอ็นโค้ดเดอร์ และการสื่อสาร CNC
ไดรฟ์ซีรีส์ Alpha ถูกนำไปใช้ในเครื่องมือเครื่องจักรที่ควบคุมโดย FANUC และหุ่นยนต์อุตสาหกรรมหลากหลายประเภท
ในศูนย์กลางการผลิต CNC, มอเตอร์แต่ละแกนจะมี SVM ของตัวเอง ในหุ่นยนต์อุตสาหกรรมหกแกน, มอเตอร์แต่ละข้อต่อจะมี SVM ของตัวเอง หรือใช้ร่วมกับยูนิต SVM ของเพื่อนบ้าน
SVM เหล่านี้แต่ละตัวมีบอร์ดควบคุม เมื่อบอร์ดควบคุมเซอร์โวไดรฟ์เสียหาย, แกนหรือข้อต่อนั้นจะหยุดทำงาน — และด้วยบอร์ดทดแทนที่ถูกต้อง, มันจะกลับมาทำงานได้อีกครั้ง
ซีรีส์ A20B-2001 ครอบคลุมบอร์ดควบคุมสำหรับคอนฟิกูเรชัน SVM Alpha หลายแบบ, ครอบคลุมเรตติ้งกระแสไดรฟ์และประเภทอินเทอร์เฟซที่แตกต่างกัน
รุ่น -0821 ให้บริการโมเดล SVM และการแก้ไขฮาร์ดแวร์เฉพาะของตนภายในตระกูลนี้
บอร์ดผลิตในประเทศญี่ปุ่นและออกแบบมาเพื่อตอบสนองความต้องการการทำงานต่อเนื่องของแอปพลิเคชันเซอร์โวไดรฟ์อุตสาหกรรม
ข้อมูลจำเพาะหลัก
| พารามิเตอร์ |
ค่า |
| หมายเลขชิ้นส่วน |
A20B-2001-0821 |
| ผู้ผลิต |
FANUC Corporation |
| ประเภทผลิตภัณฑ์ |
บอร์ดควบคุมเซอร์โวแอมพลิฟายเออร์ |
| ซีรีส์บอร์ด |
A20B-2001 |
| ตระกูลไดรฟ์ |
FANUC Alpha Series SVM |
| การใช้งาน |
การควบคุมเซอร์โวไดรฟ์ CNC และหุ่นยนต์ FANUC |
| ต้นกำเนิด |
ญี่ปุ่น |
| อุณหภูมิการทำงาน |
0 – 55°C (เมื่อติดตั้งในยูนิต SVM) |
| อุณหภูมิการจัดเก็บ |
−20 – 55°C |
| ความชื้น |
สูงสุด 75% RH (ไม่ควบแน่น) |
| สภาพที่มีจำหน่าย |
ใหม่ (ส่วนเกิน) / ปรับปรุงใหม่ / ซ่อมแซม |
บอร์ดควบคุม SVM — สามลูปในหนึ่งเดียว
บอร์ดควบคุมเซอร์โวไดรฟ์ดำเนินการควบคุมป้อนกลับเซอร์โวทั้งสามระดับพร้อมกัน การทำความเข้าใจว่าลูปเหล่านี้ทำงานร่วมกันอย่างไรจะอธิบายได้ทั้งสิ่งที่ทำให้เซอร์โวไดรฟ์ที่ทำงานได้ดีทำงานได้อย่างแม่นยำ และสิ่งที่เสียหายเมื่อบอร์ดควบคุมเสื่อมสภาพ
ลูปกระแสเป็นรากฐาน
มันอ่านกระแสเฟสของมอเตอร์จากเซ็นเซอร์กระแสของ SVM, เปรียบเทียบกับคำสั่งกระแสจากตัวควบคุมความเร็ว, และปรับสัญญาณเกต IGBT เพื่อให้กระแสจริงถึงระดับที่สั่งการ ลูปนี้ทำงานด้วยอัตราหลายหมื่นเฮิรตซ์
วงจรวัดกระแสที่เสื่อมสภาพบนบอร์ดจะทำให้เกิดข้อผิดพลาดในลูปนี้, ทำให้เกิดการบิดเบือนกระแสที่ปรากฏเป็นเสียงรบกวนของมอเตอร์, การสั่นสะเทือน และความร้อน
ลูปความเร็วอยู่เหนือลูปกระแส
มันอ่านป้อนกลับเอ็นโค้ดเดอร์, คำนวณความเร็วของมอเตอร์จริง, เปรียบเทียบกับความเร็วที่สั่งการจากตัวควบคุมตำแหน่ง, และสร้างคำสั่งกระแส
ลูปนี้อัปเดตทุกๆ ไม่กี่ร้อยไมโครวินาที
วงจรอินเทอร์เฟซเอ็นโค้ดเดอร์ที่เสื่อมสภาพจะทำให้เกิดสัญญาณรบกวนในการป้อนกลับความเร็ว, ทำให้เกิดความไม่เสถียรของความเร็ว
ลูปตำแหน่งอยู่ด้านบนสุด มันรับเป้าหมายตำแหน่งจากอินเทอร์โพเลเตอร์ของ CNC และเปรียบเทียบกับตำแหน่งเอ็นโค้ดเดอร์จริง
ข้อผิดพลาดตำแหน่งจะขับเคลื่อนคำสั่งความเร็ว การปิดลูปนี้เกิดขึ้นทุกรอบเซอร์โว — โดยทั่วไปคือ 1 มิลลิวินาที
ความแม่นยำของการวางตำแหน่งแกนของเครื่องจักรจะถูกกำหนดโดยวิธีการที่ทั้งสามลูปทำงานร่วมกันบนบอร์ดควบคุมนี้
Alpha SVM ในแอปพลิเคชัน CNC และหุ่นยนต์
ในเครื่องมือเครื่องจักร CNC, โมดูล Alpha SVM จะถูกติดตั้งควบคู่ไปกับ PSM ในตู้ไดรฟ์ SVM แต่ละตัวขับเคลื่อนหนึ่งแกน ในศูนย์กลางการผลิต 3 แกน, โดยทั่วไปจะมี SVM สามตัว — หนึ่งสำหรับ X, หนึ่งสำหรับ Y, หนึ่งสำหรับ Z — บวกกับโมดูลแอมพลิฟายเออร์สปินเดิล
บอร์ดควบคุมใน SVM เหล่านี้สื่อสารกับ CNC ผ่านบัสเซอร์โวแบบอนุกรมของ FANUC, รับคำสั่งตำแหน่งและรายงานตำแหน่งเอ็นโค้ดเดอร์
ในคอนโทรลเลอร์หุ่นยนต์อุตสาหกรรม FANUC, สถาปัตยกรรม SVM เดียวกันจะขับเคลื่อนมอเตอร์ข้อต่อของหุ่นยนต์
ตัวอย่างเช่น คอนโทรลเลอร์รุ่น R-J3 ใช้ Alpha SVM สำหรับแกนข้อต่อทั้งหกของหุ่นยนต์
คอนโทรลเลอร์หุ่นยนต์สื่อสารกับ SVM เหล่านี้ผ่านอินเทอร์เฟซแบบอนุกรมเดียวกับ CNC
บอร์ดควบคุม A20B-2001-0821 ให้บริการทั้งสองบริบทการใช้งานเนื่องจากสถาปัตยกรรมฮาร์ดแวร์มีความสอดคล้องกัน
ความเข้ากันได้ข้ามแอปพลิเคชันนี้เป็นข้อได้เปรียบในทางปฏิบัติในการบำรุงรักษา
บอร์ดควบคุมจากหุ่นยนต์ที่ปลดประจำการอาจใช้เป็นบอร์ดทดแทนในเครื่องจักร CNC ได้ และในทางกลับกัน หากหมายเลขชิ้นส่วนเต็มตรงกันทุกประการ
การระบุข้อผิดพลาดของบอร์ดควบคุม
ข้อผิดพลาดของบอร์ดควบคุมเซอร์โวไดรฟ์จะแสดงรูปแบบอาการเฉพาะที่แยกความแตกต่างจากข้อผิดพลาดของระบบไดรฟ์อื่นๆ
ข้อผิดพลาดตำแหน่ง, ความไม่เสถียรของความเร็ว, หรือเสียงรบกวนของมอเตอร์ที่ผิดปกติซึ่งปรากฏเฉพาะบนแกนใดแกนหนึ่ง — ในขณะที่แกนอื่นๆ ทำงานได้ปกติ — ชี้ไปที่บอร์ดควบคุม SVM ของแกนนั้น หรือเส้นทางป้อนกลับเอ็นโค้ดเดอร์ ปัญหาบอร์ดควบคุมมักจะเฉพาะเจาะจงกับแกนและสม่ำเสมอ
ไดรฟ์ที่ไม่สามารถเข้าสู่สถานะพร้อมทำงาน (ready state) เมื่อเปิดเครื่อง, แสดงการแจ้งเตือน VRDY (velocity ready) ก่อนที่จะมีการสั่งการเคลื่อนที่ใดๆ, เป็นสัญญาณบ่งชี้ที่ชัดเจนของข้อผิดพลาดของบอร์ดควบคุม
บอร์ดจะทำการวินิจฉัยตัวเองเมื่อเปิดเครื่อง ความล้มเหลวในลำดับนี้จะทำให้เกิดการแจ้งเตือนทันทีและต่อเนื่อง
ข้อผิดพลาดตำแหน่งเป็นครั้งคราวที่แย่ลงตามอุณหภูมิ — แกนทำงานได้ถูกต้องเมื่อไดรฟ์เย็นและแย่ลงเมื่ออุ่นขึ้น — บ่งชี้ว่าส่วนประกอบที่ไวต่อความร้อนบนบอร์ดควบคุมใกล้จะหมดอายุการใช้งาน
คำถามที่พบบ่อย
Q1: แกน CNC หนึ่งแกนแสดงการแจ้งเตือน VRDY อย่างต่อเนื่องเมื่อเปิดเครื่อง แรงดันไฟฟ้า DC bus ถูกต้อง แกนอื่นๆ ปกติ นี่คือ A20B-2001-0821 หรือไม่?
การแจ้งเตือน VRDY แกนเดียวเมื่อเปิดเครื่อง, ด้วย DC bus ที่ถูกต้องและแกนอื่นๆ ปกติ, สอดคล้องกับข้อผิดพลาดของบอร์ดควบคุม
การทดสอบตัวเองเมื่อเปิดเครื่องของบอร์ดล้มเหลว ตรวจสอบไฟ LED ของ SVM สำหรับรหัสการแจ้งเตือนใดๆ
ยืนยันว่าสายเคเบิลเอ็นโค้ดเดอร์และขั้วต่อป้อนกลับเสียบแน่น — ขั้วต่อป้อนกลับที่หลวมก็สามารถทำให้เกิดอาการนี้ได้เช่นกัน
หากสายเคเบิลได้รับการยืนยันว่าดี, ให้เปลี่ยนบอร์ดควบคุม
Q2: แกนทำงานได้ถูกต้องที่ความเร็วต่ำ แต่แสดงข้อผิดพลาดตำแหน่งเพิ่มขึ้นที่อัตราป้อนสูง ระบบกลไกดูปกติ นี่อาจเป็นบอร์ดควบคุมหรือไม่?
ข้อผิดพลาดตำแหน่งที่เพิ่มขึ้นที่อัตราป้อนสูงพร้อมกับระบบกลไกปกติ ชี้ไปที่ลูปควบคุมเซอร์โว
ลูปความเร็วหรือลูปกระแสอาจตอบสนองไม่เร็วพอ — สัญญาณว่าวงจรอิเล็กทรอนิกส์ประมวลผลของบอร์ดควบคุมเสื่อมสภาพ
ตรวจสอบพารามิเตอร์เซอร์โว (อัตราขยายลูป, feedforward) เพื่อยืนยันว่าถูกต้อง
หากพารามิเตอร์ถูกต้องและปัญหายังคงอยู่, DSP หรือวงจรอินเทอร์เฟซของบอร์ดควบคุมน่าจะเสื่อมสภาพตามอายุ
Q3: มอเตอร์แกนสั่นและมีเสียงรบกวนผิดปกติเมื่อหยุดนิ่ง แต่ความแม่นยำของตำแหน่งเป็นที่ยอมรับได้ระหว่างการเคลื่อนที่ อะไรบนบอร์ดควบคุมที่อาจทำให้เกิดสิ่งนี้?
การสั่นสะเทือนและเสียงรบกวนเมื่อหยุดนิ่งพร้อมกับความแม่นยำที่ยอมรับได้ระหว่างการเคลื่อนที่ มักบ่งชี้ถึงปัญหาในลูปกระแส — โดยเฉพาะส่วนการวัดกระแสหรือส่วนขับเกตของบอร์ดควบคุม
ข้อผิดพลาดเล็กน้อยหรือสัญญาณรบกวนในการป้อนกลับกระแสเมื่อหยุดนิ่งจะทำให้เกิดกระแสที่สั่นไหวซึ่งปรากฏเป็นการสั่นสะเทือน
ข้อผิดพลาดประเภทนี้มักจะแย่ลงตามอุณหภูมิเมื่อส่วนประกอบเสื่อมสภาพ เปลี่ยนบอร์ดควบคุมและเปรียบเทียบพฤติกรรมเมื่อหยุดนิ่ง
Q4: สามารถใช้บอร์ด A20B-2001-0821 ทดแทนจากแอปพลิเคชันหุ่นยนต์ในเครื่องมือเครื่องจักร CNC ได้หรือไม่?
หากหมายเลขชิ้นส่วนตรงกันทุกประการ, ฮาร์ดแวร์จะเข้ากันได้
บอร์ดควบคุมเซอร์โวทำหน้าที่เหมือนกันทั้งในแอปพลิเคชัน CNC และหุ่นยนต์ — ความแตกต่างอยู่ที่ซอฟต์แวร์คอนโทรลเลอร์และระบบกลไก, ไม่ใช่ที่บอร์ดไดรฟ์
ยืนยันว่าหมายเลขชิ้นส่วนเต็มรวมถึงส่วนต่อท้าย -0821 ตรงกัน ห้ามใช้ส่วนต่อท้ายอื่นแทนที่, แม้ว่าบอร์ดจะดูเหมือนกันทางกายภาพก็ตาม
Q5: หลังจากการเปลี่ยนบอร์ดควบคุม, แกนจะเคลื่อนที่เกินเป้าหมายตำแหน่งทุกครั้ง พารามิเตอร์ถูกกู้คืนจากสำเนาสำรอง อะไรคือสาเหตุที่เป็นไปได้?
การเคลื่อนที่เกินเป้าหมายหลังจากการเปลี่ยนบอร์ดพร้อมกับการกู้คืนพารามิเตอร์ มักบ่งชี้ถึงพารามิเตอร์ลูปเซอร์โวที่ไม่ถูกกู้คืนอย่างถูกต้อง
อัตราขยายตำแหน่ง, อัตราขยายความเร็ว, หรือค่าชดเชย feedforward อาจไม่ถูกต้อง
เปรียบเทียบพารามิเตอร์เซอร์โวแต่ละรายการสำหรับแกนที่ได้รับผลกระทบกับเอกสารเครื่องจักรและค่าสำเนาสำรอง
ยืนยันว่าการตั้งค่าประเภทเอ็นโค้ดเดอร์ถูกต้อง — การใช้การตั้งค่าประเภทเอ็นโค้ดเดอร์ที่ไม่ถูกต้องจะทำให้การปรับสเกลป้อนกลับไม่ถูกต้องซึ่งปรากฏเป็นการเคลื่อนที่เกินเป้าหมายหรือการสั่น

 ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!
ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!